
Micromobility options—akin to supply robots, mobility scooters, and electrical wheelchairs—are quickly remodeling short-distance city journey. Regardless of their rising recognition as versatile, eco-friendly transport alternate options, most micromobility units nonetheless rely closely on human management. This dependence limits operational effectivity and raises security issues, particularly in advanced, crowded metropolis environments stuffed with dynamic obstacles like pedestrians and cyclists.
The Want for Autonomous Micromobility in City Areas
Conventional transportation strategies like automobiles and buses are perfect for long-distance journey however typically battle with last-mile connectivity—the ultimate leg in city journeys. Micromobility fills this hole by providing light-weight, low-speed units that excel in brief city journeys. Nevertheless, true autonomy in micromobility stays elusive: present AI options are inclined to focus narrowly on particular duties akin to impediment avoidance or easy navigation, failing to handle the multifaceted challenges posed by actual city environments that embrace uneven terrain, stairs, and dense crowds.
Limitations of Current Robotic Studying and Simulation Platforms
Most simulation platforms for robotic coaching are tailor-made for indoor environments or vehicle-centric highway networks and lack the contextual richness and complexity present in city sidewalks, plazas, and alleys. In the meantime, extremely environment friendly platforms typically present simplified scenes unsuitable for deep studying in environments with various obstacles and unpredictable pedestrian actions. This hole restricts the flexibility of AI brokers to successfully be taught crucial expertise for autonomous micromobility.
Introducing URBAN-SIM: Excessive-Efficiency Simulation for City Micromobility
To deal with these challenges, researchers from the College of California, Los Angeles, and the College of Washington developed URBAN-SIM, a scalable, high-fidelity city simulation platform designed explicitly for autonomous micromobility analysis.
Key Options of URBAN-SIM:
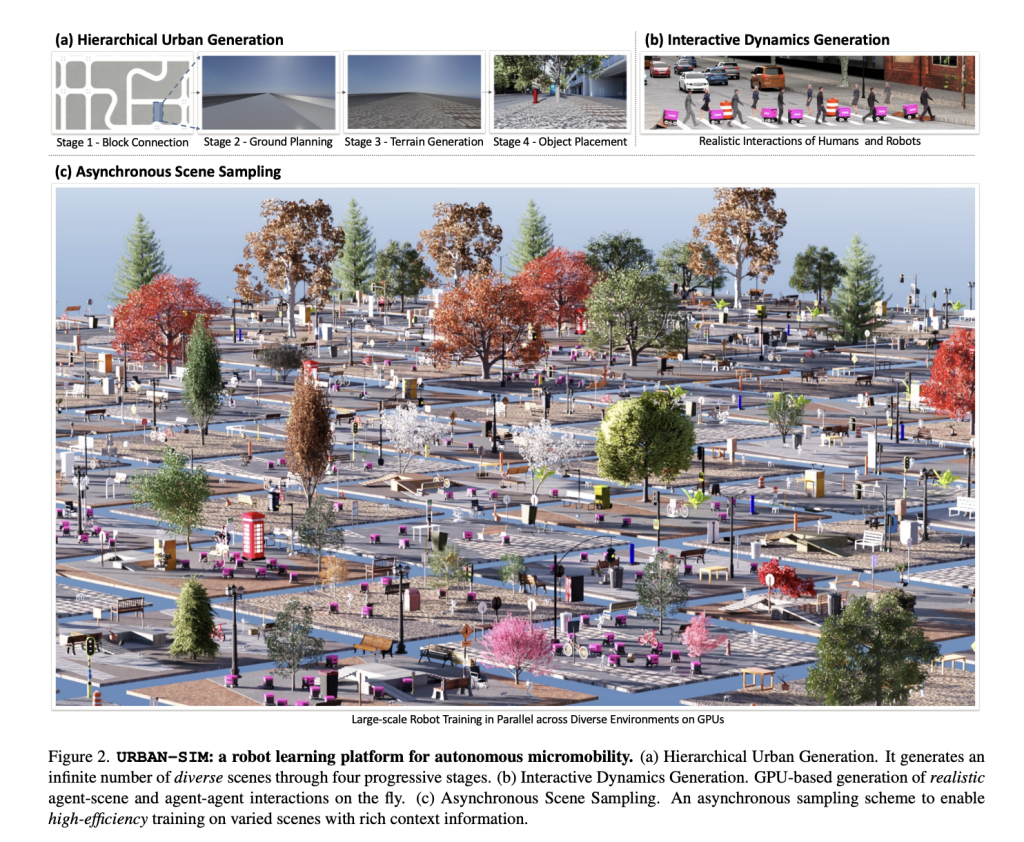
- Hierarchical City Scene Technology
Procedurally creates infinitely various, large-scale city environments—from avenue blocks to detailed terrain options—that embrace sidewalks, ramps, stairs, and uneven surfaces. This layered pipeline ensures a sensible and different setting for robotic coaching. - Interactive Dynamic Agent Simulation
Simulates responsive pedestrians, cyclists, and autos in real-time on GPUs, enabling advanced multi-agent interactions that mimic true city dynamics. - Asynchronous Scene Sampling for Scalability
Permits parallel coaching of AI brokers throughout lots of of distinctive and complicated city scenes on a single GPU, dramatically boosting coaching velocity and selling strong coverage studying.
Constructed on NVIDIA’s Omniverse and PhysX physics engine, URBAN-SIM combines real looking visible rendering with precision physics for genuine embodied AI coaching.
URBAN-BENCH: Complete Benchmark Suite for Actual-World Abilities
Complementing URBAN-SIM, the workforce created URBAN-BENCH, a process suite and benchmark framework that captures important autonomous micromobility capabilities grounded in precise city utilization situations. URBAN-BENCH consists of:
- City Locomotion Duties: Traversing flat surfaces, slopes, stairs, and tough terrain to make sure secure and environment friendly robotic motion.
- City Navigation Duties: Navigating clear pathways, avoiding static obstacles like benches and trash bins, and managing dynamic obstacles akin to shifting pedestrians and cyclists.
- City Traverse Activity: A difficult kilometer-scale journey combining advanced terrains, obstacles, and dynamic brokers, designed to check long-horizon navigation and decision-making.
Human-AI Shared Autonomy Method
For the long-distance city traverse process, URBAN-BENCH introduces a human-AI shared autonomy mannequin. This versatile management structure decomposes the robotic’s management system into layers—high-level determination making, mid-level navigation, and low-level locomotion—permitting people to intervene in advanced or dangerous situations whereas enabling AI to handle routine navigation and motion. This collaboration balances security and effectivity in dynamic city settings.
Evaluating Numerous Robots in Lifelike Duties
URBAN-SIM and URBAN-BENCH assist a variety of robotic platforms, together with wheeled, quadruped, wheeled-legged, and humanoid robots. Benchmarks reveal distinctive strengths and weaknesses for every robotic sort throughout locomotion and navigation challenges, illustrating the platform’s generalizability.
For instance:
- Quadruped robots excel in stability and stair traversal.
- Wheeled robots carry out finest on clear, flat paths.
- Wheeled-legged robots leverage their hybrid design for mixed terrain adaptability.
- Humanoid robots successfully navigate slender, crowded city areas by sidestepping.
Scalability and Coaching Effectivity
The asynchronous scene sampling technique permits coaching throughout various city scenes, demonstrating as much as a 26.3% efficiency enchancment over synchronous coaching strategies. Growing the range of coaching environments immediately correlates with increased success charges in navigation duties, highlighting the need of large-scale, different simulation for strong autonomous micromobility.
Conclusion
URBAN-SIM and URBAN-BENCH characterize very important steps towards enabling secure, environment friendly, and scalable autonomous micromobility in advanced city settings. Future work goals to bridge simulation and real-world deployment via ROS 2 integration and sim-to-real switch strategies. Moreover, the platform will evolve to include multi-modal notion and manipulation capabilities obligatory for complete city robotic purposes akin to parcel supply and assistive robotics.
By enabling scalable coaching and benchmarking of embodied AI brokers in genuine city situations, this analysis catalyzes progress in autonomous micromobility—selling sustainable city improvement, enhancing accessibility, and enhancing security in public areas.
Take a look at the Paper and Code. All credit score for this analysis goes to the researchers of this mission. SUBSCRIBE NOW to our AI E-newsletter
Sana Hassan, a consulting intern at Marktechpost and dual-degree pupil at IIT Madras, is obsessed with making use of know-how and AI to handle real-world challenges. With a eager curiosity in fixing sensible issues, he brings a recent perspective to the intersection of AI and real-life options.


{kind=link}