

Researchers at NVIDIA are working to allow scalable artificial era for robotic mannequin coaching. Supply: NVIDIA
A significant problem in robotics is coaching robots to carry out new duties with out the large effort of accumulating and labeling datasets for each new job and surroundings. Latest analysis efforts from NVIDIA intention to resolve this problem by means of using generative AI, world basis fashions like NVIDIA Cosmos, and information era blueprints corresponding to NVIDIA Isaac GR00T-Mimic and GR00T-Desires.
NVIDIA not too long ago lined how analysis is enabling scalable artificial information era and robotic mannequin coaching workflows utilizing world basis fashions, corresponding to:
- DreamGen: The analysis basis of the NVIDIA Isaac GR00T-Desires blueprint.
- GR00T N1: An open basis mannequin that permits robots to study generalist abilities throughout numerous duties and embodiments from actual, human, and artificial information.
- Latent motion pretraining from movies: An unsupervised technique that learns robot-relevant actions from large-scale movies with out requiring handbook motion labels.
- Sim-and-real co-training: A coaching method that mixes simulated and real-world robotic information to construct extra sturdy and adaptable robotic insurance policies.
World basis fashions for robotics
Cosmos world basis fashions (WFMs) are educated on tens of millions of hours of real-world information to foretell future world states and generate video sequences from a single enter picture, enabling robots and autonomous automobiles to anticipate upcoming occasions. This predictive functionality is essential for artificial information era pipelines, facilitating the fast creation of numerous, high-fidelity coaching information.
This WFM method can considerably speed up robotic studying, improve mannequin robustness, and scale back growth time from months of handbook effort to simply hours, in line with NVIDIA.
DreamGen
DreamGen is an artificial information era pipeline that addresses the excessive value and labor of accumulating large-scale human teleoperation information for robotic studying. It’s the foundation for NVIDIA Isaac GR00T-Desires, a blueprint for producing huge artificial robotic trajectory information utilizing world basis fashions.
Conventional robotic basis fashions require intensive handbook demonstrations for each new job and surroundings, which isn’t scalable. Simulation-based options typically undergo from the sim-to-real hole and require heavy handbook engineering.
DreamGen overcomes these challenges through the use of WFMs to create lifelike, numerous coaching information with minimal human enter. This method allows scalable robotic studying and robust generalization throughout behaviors, environments, and robotic embodiments.
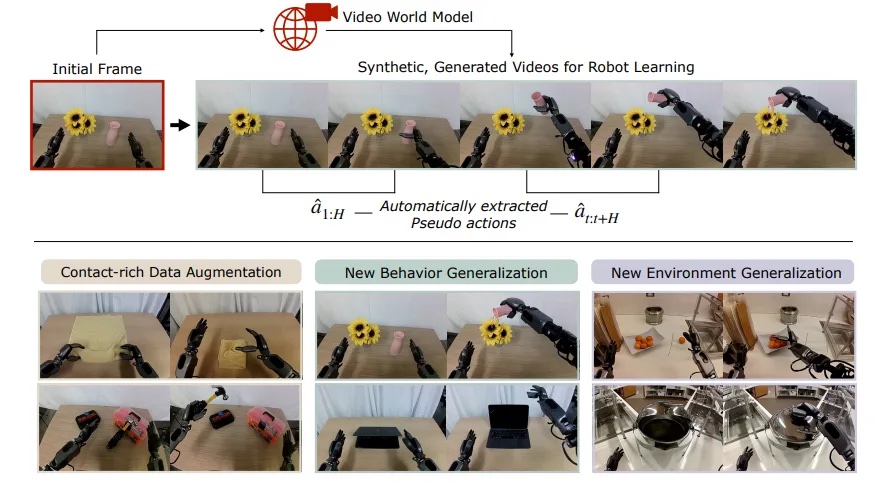
Generalization by means of the DreamGen artificial information pipeline. | Supply: NVIDIA
The DreamGen pipeline consists of 4 key steps:
- Submit-train world basis mannequin: Adapt a world basis mannequin like Cosmos-Predict2 to the goal robotic utilizing a small set of actual demonstrations. Cosmos-Predict2 can generate high-quality photos from textual content (text-to-image) and visible simulations from photos or movies (video-to-world).
- Generate artificial movies: Use the post-trained mannequin to create numerous, photorealistic robotic movies for brand spanking new duties and environments from picture and language prompts.
- Extract pseudo-actions: Apply a latent motion mannequin or inverse dynamics mannequin (IDM) to show these movies into labeled motion sequences (neural trajectories).
- Prepare robotic insurance policies: Use the ensuing artificial trajectories to coach visuomotor insurance policies, enabling robots to carry out new behaviors and generalize to unseen eventualities.
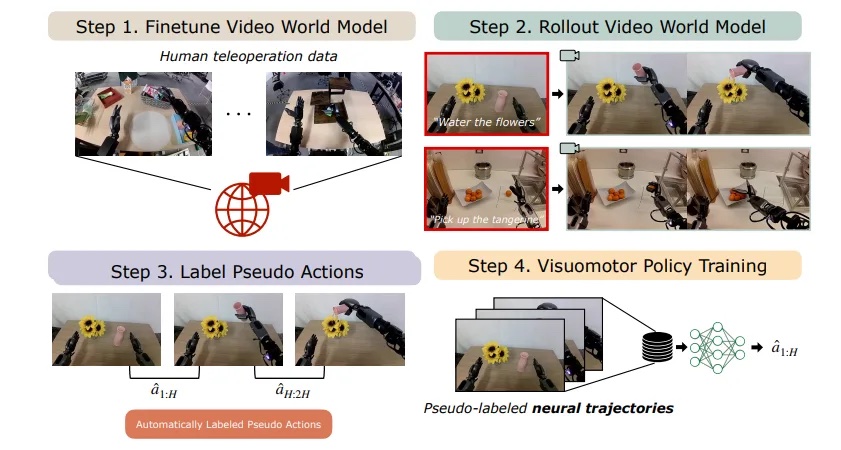
Overview of the DreamGen pipeline. | Supply: NVIDIA
DreamGen Bench
DreamGen Bench is a specialised benchmark designed to judge how successfully video generative fashions adapt to particular robotic embodiments whereas internalizing rigid-body physics and generalizing to new objects, behaviors, and environments. It exams 4 main world basis fashions—NVIDIA Cosmos, WAN 2.1, Hunyuan, and CogVideoX—measuring two vital metrics:
- Instruction following: DreamGen Bench assesses whether or not generated movies precisely replicate job directions — corresponding to “decide up the onion” — evaluated utilizing vision-language fashions (VLMs) like Qwen-VL-2.5 and human annotators.
- Physics following: It quantifies bodily realism utilizing instruments corresponding to VideoCon-Physics and Qwen-VL-2.5 to make sure that movies obey real-world physics.
As seen within the graph beneath, fashions scoring greater on DreamGen Bench—that means they generate extra lifelike and instruction-following artificial information—constantly result in higher efficiency when robots are educated and examined on actual manipulation duties. This constructive relationship exhibits that investing in stronger WFMs not solely improves the standard of artificial coaching information but additionally interprets instantly into extra succesful and adaptable robots in apply.
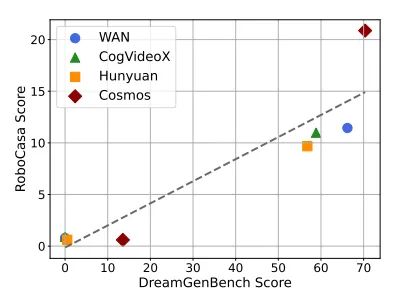
Optimistic efficiency correlation between DreamGen Bench and RoboCasa. | Supply: NVIDIA
NVIDIA Isaac GR00T-Desires
Isaac GR00T-Desires, primarily based on DreamGen analysis, is a workflow for producing massive datasets of artificial trajectory information for robotic actions. These datasets are used to coach bodily robots whereas saving vital time and handbook effort in contrast with accumulating real-world motion information, asserted NVIDIA.
GR00T-Desires makes use of the Cosmos Predict2 WFM and Cosmos Motive to generate information for various duties and environments. Cosmos Motive fashions embody a multimodal LLM (massive language mannequin) that generates bodily grounded responses to person prompts.

Basis fashions and workflows for coaching robots
Imaginative and prescient-language-action (VLA) fashions will be post-trained utilizing information generated from WFMs to allow novel behaviors and operations in unseen environments, defined NVIDIA.
NVIDIA Analysis used the GR00T-Desires blueprint to generate artificial coaching information to develop GR00T N1.5, an replace of GR00T N1 in simply 36 hours. This course of would have taken practically three months utilizing handbook human information assortment.
GR00T N1, an open basis mannequin for generalist humanoid robots, marks a serious breakthrough on the earth of robotics and AI, the corporate mentioned. Constructed on a dual-system structure impressed by human cognition, GR00T N1 unifies imaginative and prescient, language, and motion, enabling robots to know directions, understand their environments, and execute advanced, multi-step duties.
GR00T N1 builds on strategies like LAPA (latent motion pretraining for basic motion fashions) to study from unlabeled human movies and approaches like sim-and-real co-training, which blends artificial and real-world information for stronger generalization. We’ll find out about LAPA and sim-and-real co-training later.
By combining these improvements, GR00T N1 doesn’t simply comply with directions and execute duties—it units a brand new benchmark for what generalist humanoid robots can obtain in advanced, ever-changing environments, NVIDIA mentioned.
GR00T N1.5 is an upgraded open basis mannequin for generalist humanoid robots, constructing on the unique GR00T N1, which includes a refined VLM educated on a various mixture of actual, simulated, and DreamGen-generated artificial information.
With enhancements in structure and information high quality, GR00T N1.5 delivers greater success charges, higher language understanding, and stronger generalization to new objects and duties, making it a extra sturdy and adaptable answer for superior robotic manipulation.
Latent Motion Pretraining from Movies
LAPA is an unsupervised technique for pre-training VLA fashions that removes the necessity for costly, manually labeled robotic motion information. Reasonably than counting on massive, annotated datasets—that are each expensive and time-consuming to collect—LAPA makes use of over 181,000 unlabeled Web movies to study efficient representations.
This technique delivers a 6.22% efficiency enhance over superior fashions on real-world duties and achieves greater than 30x higher pretraining effectivity, making scalable and sturdy robotic studying way more accessible and environment friendly, mentioned NVIDIA.
The LAPA pipeline operates by means of a three-stage course of:
- Latent motion quantization: A Vector Quantized Variational AutoEncoder (VQ-VAE) mannequin learns discrete “latent actions” by analyzing transitions between video frames, making a vocabulary of atomic behaviors corresponding to greedy or pouring. Latent actions are low-dimensional, discovered representations that summarize advanced robotic behaviors or motions, making it simpler to regulate or imitate high-dimensional actions.
- Latent pretraining: A VLM is pre-trained utilizing habits cloning to foretell these latent actions from the primary stage primarily based on video observations and language directions. Conduct cloning is a technique the place a mannequin learns to repeat or imitate actions by mapping observations to actions, utilizing examples from demonstration information.
- Robotic post-training: The pretrained mannequin is then post-trained to adapt to actual robots utilizing a small labeled dataset, mapping latent actions to bodily instructions.
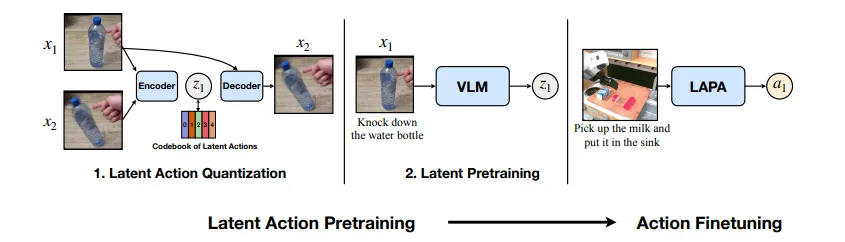
Overview of latent motion pretraining. | Supply: NVIDIA
Sim-and-real co-training workflow
Robotic coverage coaching faces two vital challenges: the excessive value of accumulating real-world information and the “actuality hole,” the place insurance policies educated solely in simulation typically fail to carry out properly in actual bodily environments.
The sim-and-real co-training workflow addresses these points by combining a small set of real-world robotic demonstrations with massive quantities of simulation information. This method allows the coaching of sturdy insurance policies whereas successfully decreasing prices and bridging the truth hole.
Overview of the completely different levels of acquiring information. | Supply: NVIDIA
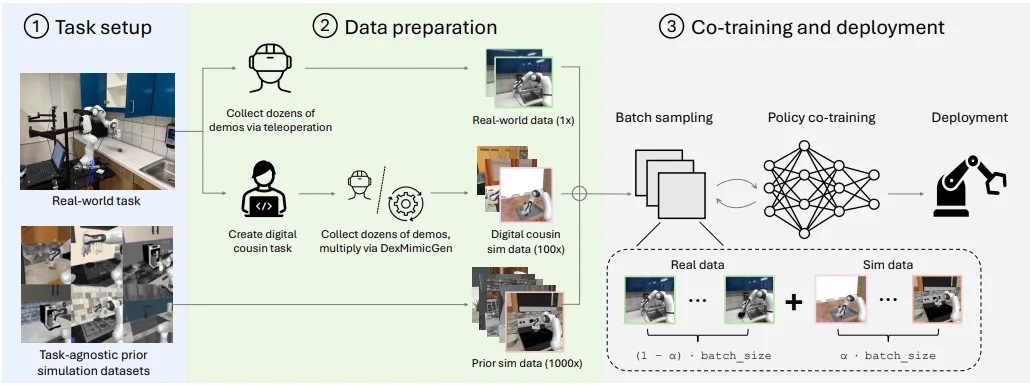
The important thing steps within the workflow are:
- Process and scene setup: Setup of a real-world job and the number of task-agnostic prior simulation datasets.
- Information preparation: On this information preparation stage, real-world demonstrations are collected from bodily robots, whereas extra simulated demonstrations are generated, each as task-aware “digital cousins,” which carefully match the actual duties, and as numerous, task-agnostic prior simulations.
- Co-training parameter tuning: These completely different information sources are then blended at an optimized co-training ratio, with an emphasis on aligning digital camera viewpoints and maximizing simulation variety somewhat than photorealism. The ultimate stage includes batch sampling and coverage co-training utilizing each actual and simulated information, leading to a sturdy coverage that’s deployed on the robotic.
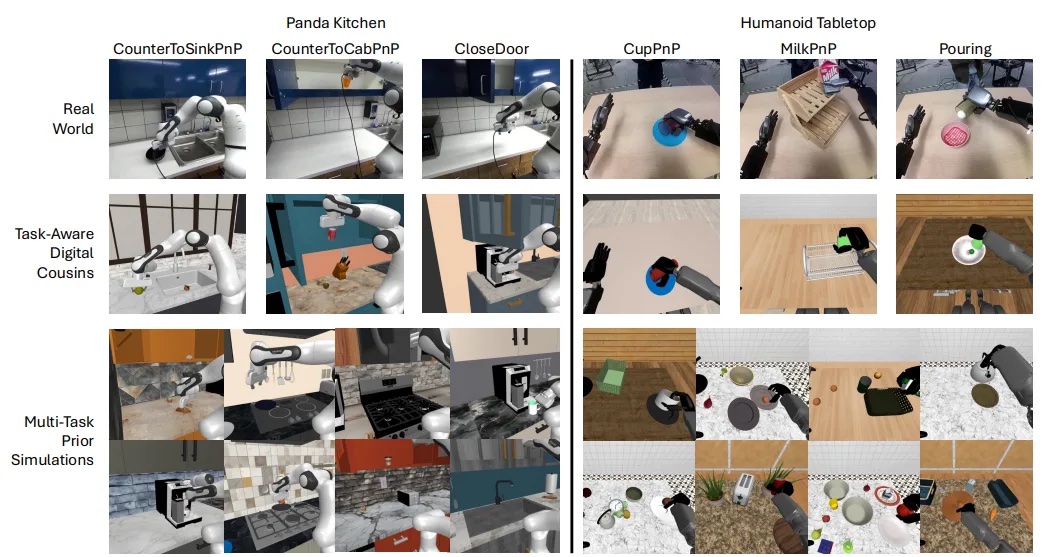
Visible of simulation and real-world duties. | Supply: NVIDIA
As proven within the picture beneath, rising the variety of real-world demonstrations can enhance the success fee for each real-only and co-trained insurance policies. Even with 400 actual demonstrations, the co-trained coverage constantly outperformed the real-only coverage by a median of 38%, demonstrating that sim-and-real co-training stays useful even in data-rich settings.
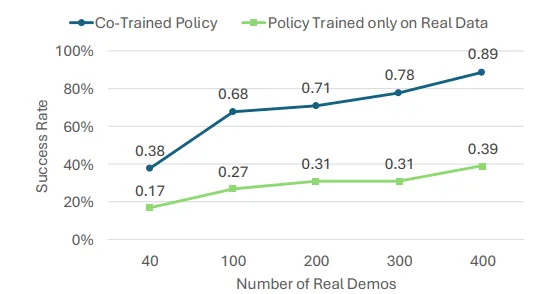
Graph displaying the efficiency of the co-trained coverage and coverage educated on actual information solely. | Supply: NVIDIA
Robotics ecosystem begins adopting new fashions
Main organizations are adopting these workflows from NVIDIA analysis to speed up growth. Early adopters of GR00T N fashions embody:
- AeiRobot: Utilizing the fashions to allow its industrial robots to know pure language for advanced pick-and-place duties.
- Foxlink: Leveraging the fashions to enhance the pliability and effectivity of its industrial robotic arms.
- Lightwheel: Validating artificial information for the sooner deployment of humanoid robots in factories utilizing the fashions.
- NEURA Robotics: Evaluating the fashions to speed up the event of its family automation methods.
 In regards to the creator
In regards to the creator

Oluwaseun Doherty is a technical advertising and marketing engineer intern at NVIDIA, the place he works on robotic studying purposes on the NVIDIA Isaac Sim, Isaac Lab, and Isaac GR00T platforms. Doherty is at the moment pursuing a bachelor’s diploma in pc science at Southeastern Louisiana College, the place he focuses on information science, AI, and robotics.
Editor’s notice: This text was syndicated from NVIDIA’s technical weblog.

{kind=link}