
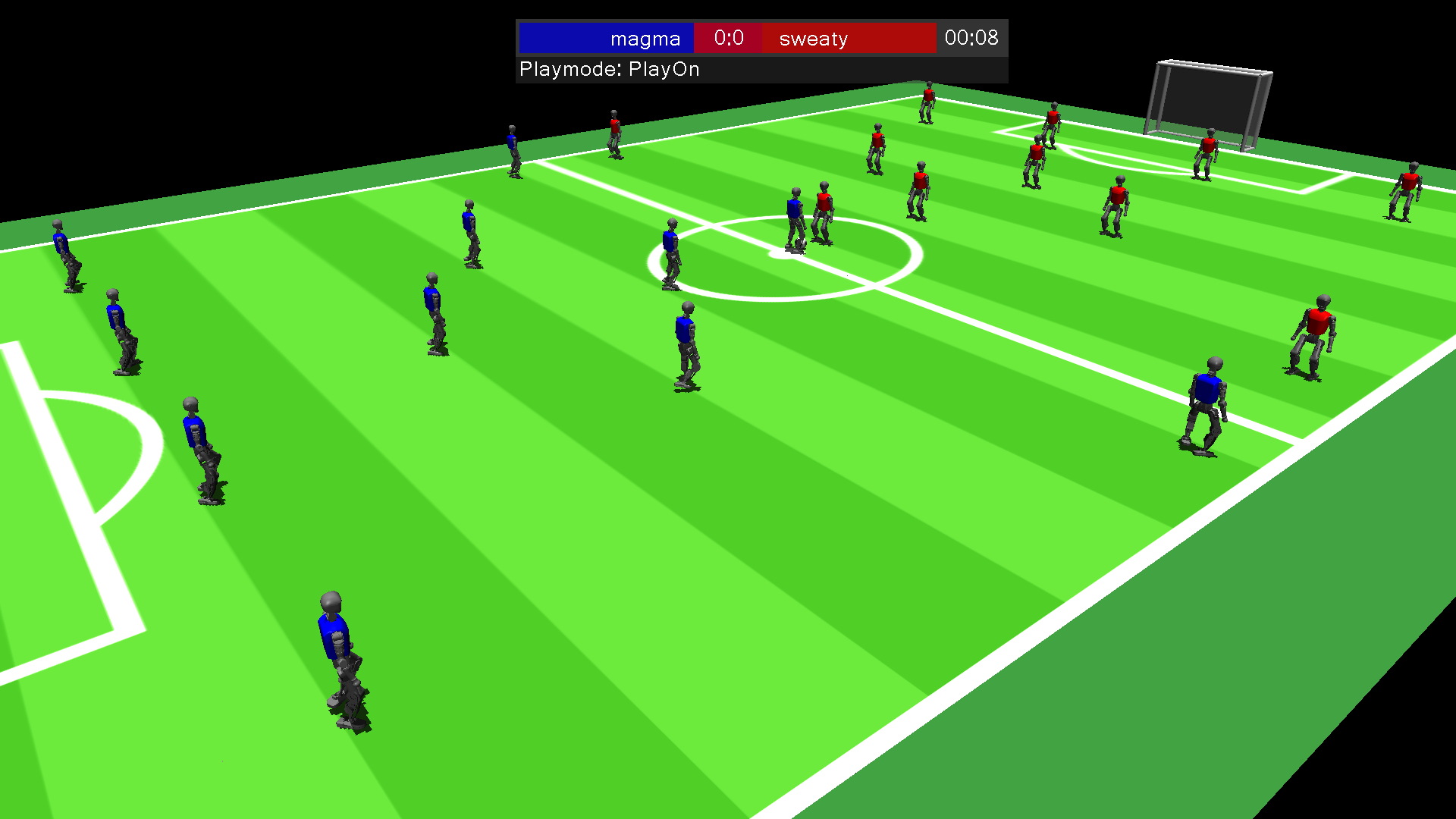
 A screenshot from the brand new simulator that shall be trialled for a particular problem at RoboCup2025.
A screenshot from the brand new simulator that shall be trialled for a particular problem at RoboCup2025.
The annual RoboCup occasion, the place groups collect from throughout the globe to participate in competitions throughout a variety of leagues, will this yr happen in Brazil, from 15-21 July. Prematurely of kick-off, we spoke to 2 members of the RoboCup Soccer 3D Simulation League: Govt Committee Member Klaus Dorer, and Stefan Glaser, who’s on the Upkeep Committee and who has been just lately growing a brand new simulator for the League.
May begin by simply giving us a fast introduction to the Simulation League?
Klaus Dorer: There are two Simulation Leagues in Soccer: the 2D Simulation League and the 3D Simulation League. The 2D Simulation League, because the title suggests, is a flat league the place the gamers and ball are simulated with simplified physics and the primary focus is on staff technique. The 3D Simulation League is far nearer to actual robots; it simulates 11 versus 11 Nao robots. The extent of management is like with actual robots, the place you progress every motor of the legs and the arms and so forth to attain motion.
I perceive that you’ve been engaged on a brand new simulator for the 3D League. What was the concept behind this new simulator?
Klaus: The intention is to deliver us nearer to the {hardware} leagues in order that the simulator may be extra helpful. The present simulator that we use within the 3D Simulation League is named SimSpark. It was created within the early 2000s with the intention of creating it potential to play 11 vs 11 gamers. With the {hardware} constraints of that point, there needed to be some compromises on the physics to have the ability to simulate 22 gamers on the identical time. So the simulation is bodily considerably lifelike, however not within the sense that it’s simple to transpose it to an actual Nao robotic.
Stefan Glaser: The thought for growing a brand new simulator has been round for a number of years. SimSpark is a really highly effective simulation framework. The bottom framework is area impartial (not soccer particular) and particular simulations are realized through plugins. It helps a number of physics engines within the backend and supplies a versatile scripting interface for configuration and diversifications of the simulation. Nevertheless, all this flexibility comes with the value of complexity. Along with that, SimSpark makes use of customized robotic mannequin specs and communication protocols, limiting the quantity of accessible robotic fashions and requiring groups to develop customized communication layers just for speaking with SimSpark. Because of this, SimSpark has not been extensively adopted within the RoboCup group.
With the brand new simulator, I want to tackle these two main points: complexity and standardization. Within the ML group, the MuJoCo physics engine has turn out to be a very fashionable selection for studying environments after Google DeepMind acquired it and launched it open supply. Its requirements for world and robotic mannequin specs are extensively adopted locally and there exist lots of ready-to-use robotic mannequin specs for all kinds of digital in addition to real-world robots. In the midst of final yr, they (MuJoCo) added a function which lets you manipulate the world illustration throughout simulation (including and eradicating objects to / from the simulation whereas preserving the simulation state). That is one important requirement we’ve within the simulation league, the place we begin with an empty discipline after which the brokers join on demand and type the groups. When this function has been added, I made a decision to make a step ahead and attempt to implement a brand new simulator for the 3D Simulation League primarily based on MuJoCo. Initially, I needed to start out growth in C/C++ to attain most efficiency, however then determined to start out in Python to scale back complexity and make it extra accessible for different builders. I began growth on Easter Monday so it’s not even three months outdated!
I believe it may be helpful to clarify slightly bit extra concerning the setup of our league and the necessities of the simulator. If we take the FIFA sport (in your favourite gaming system) for example, there may be one simulation occurring which simulates 22 gamers and the choice making is a part of the simulation having full entry to the state of the world. Within the 3D Simulation League we’ve two groups with 11 robots on the sphere, however we even have 22 particular person agent softwares that are related to the simulation server, every controlling one single robotic. Every related agent solely receives sensor info associated to their robotic within the simulation. They’re additionally solely allowed to speak through the server – there is no such thing as a direct communication between the brokers allowed in Simulation League. So we’ve a normal setup the place the simulation server has to have the ability to settle for as much as 22 connections and handle the scenario there. This performance has been the main focus for me for the final couple of months and this half is already working effectively. Groups can join their brokers, which is able to obtain sensor info and may actuate joints of the robotic within the simulation and so forth. They’re additionally capable of choose totally different robotic fashions in the event that they like.
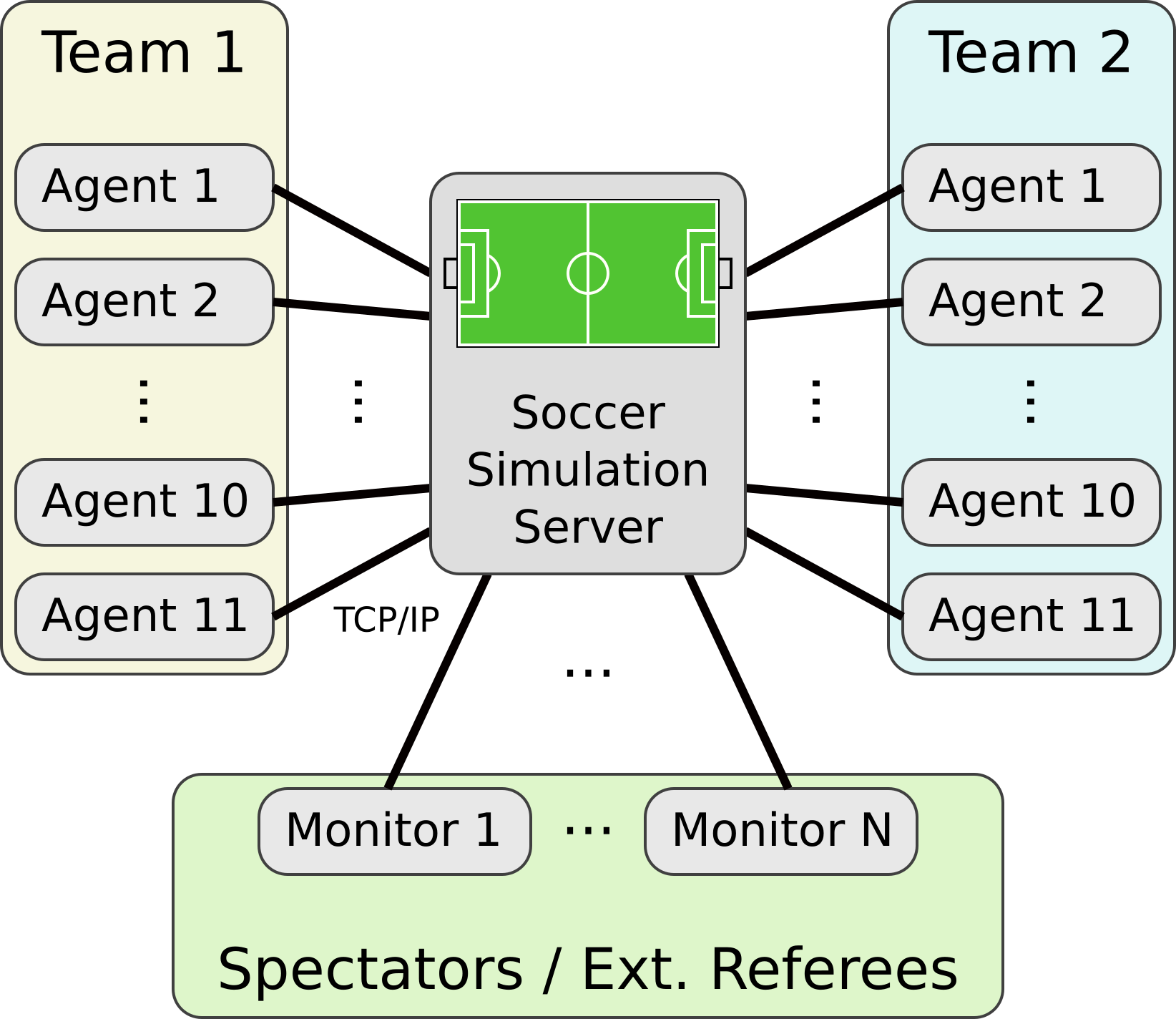 An illustration of the simulator set-up.
An illustration of the simulator set-up.
Presumably the brand new simulator has a greater illustration of the physics of an actual robotic.
Klaus: Precisely. For instance, how the motors are managed is now a bit totally different and far nearer to actual robots. So once I did my first experiments, I noticed the robotic collapse and I assumed it was precisely how an actual robotic would collapse! In SimSpark we additionally had falling robots however the motor management within the new simulator is totally different. Now you’ll be able to management the motors by velocity, by pressure, by place, which is far more versatile – it’s nearer to what we all know from actual robots.
I believe that, no less than initially, it is going to be harder for the Simulation League groups to get the robots to do what they need them to do, as a result of it’s extra lifelike. For instance, in SimSpark the bottom contact was far more forgiving. So for those who step exhausting on the bottom, you don’t fall instantly with a SimSpark robotic however with a MuJoCo robotic this shall be far more lifelike. Certainly, in actual robots floor contact is considerably much less forgiving.
I had a query concerning the imaginative and prescient facet – how do the person brokers “see” the place of the opposite brokers on the sphere?
Stefan: We simulate a digital imaginative and prescient pipeline on the server aspect. You have got a restricted discipline of view of ±60° horizontally and vertically. Inside that discipline of view you’ll detect the top, the arms, the ft of different gamers, or the ball, for instance, or totally different options of the sphere. Much like frequent real-world imaginative and prescient pipelines, every detection consists of a label, a path vector and the gap info. The data has some noise on it like actual robots have, too, however groups don’t must course of digital camera pictures. They get the detections immediately from the simulation server.
We’ve beforehand had a dialogue about transferring in the direction of getting digital camera pictures of the simulation to combine into the imaginative and prescient pipeline on the agent aspect. This was by no means actually lifelike in SimSpark with the implementation we had there. Nevertheless, it ought to be potential with MuJoCo. Nevertheless, for the primary model, I used the identical method the normal simulator handled the imaginative and prescient. Which means groups don’t want to coach a imaginative and prescient mannequin, and don’t must deal with digital camera pictures to get began. This reduces the load considerably and likewise shifts the main target of the issue in the direction of movement and determination making.
Will the simulator be used at RoboCup 2025?
Stefan: We plan to have a problem with a brand new simulator and I’ll attempt to present some demo video games. In the intervening time it’s not likely in a state the place you’ll be able to play a complete competitors.
Klaus: That’s often how we proceed with new simulators. We might not transfer from one to the opposite with none intermediate step. We may have a problem this yr at RoboCup 2025 with the brand new MuJoCo simulator the place every collaborating staff will attempt to educate the robotic to kick so far as potential. So, we is not going to be taking part in a complete sport, we received’t have a number of robots, only a single robotic stepping in entrance of the ball and kicking the ball. That’s the technical problem for this yr. Groups will get an thought of how the simulator works, and we’ll get an thought of what must be modified within the simulator to proceed.
This new problem shall be voluntary, so we’re not positive what number of groups will take part. Our staff (MagmaOffenburg) will definitely participate. Will probably be fascinating to see how effectively the groups carry out as a result of nobody is aware of how far an excellent kick is on this simulator. It’s a bit like in Method One when the principles change and nobody is aware of which staff would be the main staff.
Do you might have an thought of how a lot adaptation groups should make if and while you transfer to the brand new simulator for the complete matches?
Stefan: As a long-term member of 3D Simulation League, I do know the outdated simulator SimSpark fairly effectively, and know the protocols concerned and the way the processes work. So the primary model of the brand new simulator is designed to make use of the identical primary protocol, the identical sensor info, and so forth. The thought is that the groups can use the brand new simulator with minimal effort in adapting their present agent software program. So they need to have the ability to get began fairly quick.
Though, when designing a brand new platform, I want to take the chance to make a step ahead by way of protocols, as a result of I additionally wish to combine different Leagues within the long-term. They often produce other management mechanisms, they usually don’t use the identical protocol that’s distinguished in 3D Simulation. Due to this fact there must be some flexibility sooner or later. However for the primary model, the concept was to get the Simulation League prepared with minimal effort.
Klaus: The massive thought is that this isn’t simply used within the 3D Simulation league, but additionally as a helpful simulator for the Humanoid League and likewise for the Commonplace Platform League (SPL). So if that seems to be true, then it is going to be fully profitable. For the Kick Problem this yr, for instance, we use a T1 robotic that may be a Humanoid League robotic.
May you say one thing about this simulation to actual world (Sim2Real) facet?
Stefan: We’d prefer it to be potential for the motions and behaviors within the simulator to be ported to actual robots. From my viewpoint, it could be helpful the opposite method spherical too.
We, as a Simulation League, often develop for the Simulation League and due to this fact want to get the behaviors operating on an actual robotic. However the {hardware} groups often have an identical difficulty after they wish to take a look at high-level determination making. They may have two to 5 robots on the sphere, and in the event that they wish to play a high-level decision-making match and practice in that regard, they at all times should deploy lots of robots. If in addition they wish to have an opponent, they should double the quantity of robots as a way to play a sport to see how the technique would prove. The Sim2Real facet can be fascinating for these groups, as a result of they need to have the ability to take what they deployed on the actual robotic and it must also work within the simulation. They’ll then use the simulation to coach high-level abilities like staff play, participant positioning and so forth, which is a difficult facet for the actual robotic leagues like SPL or the Humanoid Leagues.
Klaus: And the explanation we all know it’s because we’ve a staff within the Simulation League and we’ve a staff within the Humanoid League. In order that’s another excuse why we’re eager to deliver this stuff nearer collectively.
How does the refereeing work within the Simulation League?
Klaus: A pleasant factor about Simulation Leagues is that there’s a program which is aware of the actual state of the world so we are able to construct within the referee contained in the simulator and it’ll not fail. For issues like offside, whether or not the ball handed the aim line, that’s fail secure. All of the referee choices are taken by the system itself. We’ve got a human referee however they by no means must intervene. Nevertheless, there are conditions the place we wish synthetic intelligence to play a job. This isn’t at the moment the case in SimSpark as a result of the principles are all exhausting coded. We’ve got lots of fouls which are debatable. For instance, there are various fouls that groups agree shouldn’t have been a foul, and different fouls that aren’t referred to as that ought to have been. It could be a pleasant AI studying activity to get some conditions judged by human referees after which practice an AI mannequin to raised decide the principles for what’s a foul and what isn’t a foul. However that is at the moment not the case.
Stefan: On the brand new simulator I’m not that far into the event that I’ve carried out the automated referee but. I’ve some primary algorithm which progress the sport as such, however judging fouls and deciding on particular conditions is just not but carried out within the new simulator.
What are the subsequent steps for growing the simulator?
Stefan: One of many subsequent main steps shall be to refine the physics simulation. As an example, though there exists a ball within the simulation, it isn’t but rather well refined. There are lots of physics parameters which we’ve to determine on to replicate the actual world nearly as good as potential. It will seemingly require a collection of experiments as a way to get to the proper values for numerous points. On this facet I’m hoping for some engagement of the group, as it’s a nice analysis alternative and I personally would like the group to determine on a generally accepted parameter set primarily based on a stage of proof that I can’t simply present all on my own. So in case somebody is all in favour of refining the physics of the simulation such that it greatest displays the actual world, you’re welcome to affix!
One other main subsequent step would be the growth of the automated referee of the soccer simulation, deciding on fouls, dealing with misbehaving brokers and so forth. Within the first model, foul circumstances will seemingly be judged by an skilled system particularly designed for this function. The simulation league has developed a set of foul situation specs which I plan to adapt. In a second step, I want to combine and help the event of AI primarily based foul detection fashions. However yeah, one step after the opposite.
What are you significantly trying ahead to at RoboCup2025?
Klaus: Properly, with our staff we’ve been vice world champion seven occasions in a row. This yr we’re actually hoping to make it to world champion. We’re very skilled in getting losses in finals and this yr we’re trying ahead to altering that, from a staff perspective.
Stefan: I’m going to Brazil as a way to promote the simulator, not only for the Simulation League, but additionally throughout the boundaries for the Humanoid Leagues and the SPL Leagues. I believe that this simulator is a superb probability to deliver folks from all of the leagues collectively. I’m significantly within the particular necessities of all of the groups of the totally different leagues. This understanding will assist me tailor the brand new simulator in the direction of their wants. That is one in every of my main highlights for this yr, I’d say.
You will discover out extra concerning the new simulator on the challenge webpage, and from the documentation.

|
Klaus Dorer is professor for synthetic intelligence, autonomous programs and software program engineering at Offenburg College, Germany. He’s additionally a member of the Institute for Machine Studying and Analytics IMLA. He has been staff chief of the RoboCup simulation league groups magmaFreiburg (since 1999), residing programs, magmaFurtwangen and is now staff chief of magmaOffenburg since 2009. Since 2014, he has additionally been a part of the humanoid grownup measurement league staff Sweaty. |

|
Stefan Glaser is instructing assistant for synthetic intelligence and clever autonomous programs on the Offenburg College, Germany. He has been a part of the RoboCup simulation league staff magmaOffenburg since 2009 and the RoboCup humanoid grownup measurement league staff Sweaty since 2014. |

AIhub
is a non-profit devoted to connecting the AI group to the general public by offering free, high-quality info in AI.
AIhub
is a non-profit devoted to connecting the AI group to the general public by offering free, high-quality info in AI.

Lucy Smith
is Managing Editor for AIhub.

{kind=link}