

In catastrophe zones, each second counts. What if a robotic may map hazardous areas in real-time, changing a whole bunch of photos into an correct 3D map immediately?
Robots navigating catastrophe zones, comparable to partially collapsed mines, should shortly map their environment and decide their precise location to soundly find survivors. Current machine-learning techniques can carry out this activity utilizing solely onboard cameras, however they usually deal with solely a small variety of photos at a time. In actual emergencies, robots should cowl massive areas and course of hundreds of photos quickly.
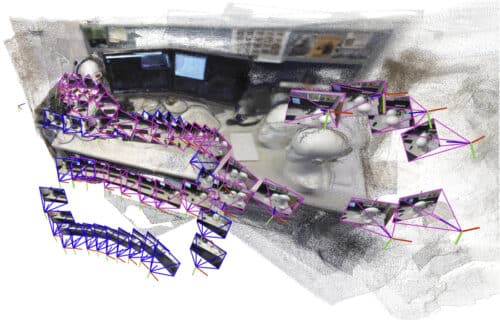
Researchers at MIT created a system to beat this limitation. It generates small 3D submaps and stitches them collectively to type a whole map, constantly monitoring the robotic’s place. Not like earlier strategies, it doesn’t require calibrated cameras or skilled tuning. This technique operates sooner, simplifies processes, and scales simply. Versatile mathematical transformations appropriate small distortions in every submap, guaranteeing correct alignment and lowering errors to beneath 5 centimeters.
The system produces high-quality 3D reconstructions in close to real-time, even from quick mobile phone movies, and permits robots to localize themselves in complicated, crowded environments comparable to workplace corridors or industrial warehouses. Past search-and-rescue, it may additionally help VR and prolonged actuality purposes or assist robots navigate warehouses effectively.
Conventional robotic navigation depends on simultaneous localization and mapping (SLAM), the place a robotic concurrently maps its atmosphere and tracks its place. Typical SLAM strategies typically fail in complicated scenes or require pre-calibrated cameras. Machine-learning fashions enhance efficiency however stay restricted within the variety of photos they’ll deal with, proscribing their usefulness for large-scale or time-critical duties.
By breaking the scene into submaps and making use of AI-enhanced alignment methods, the system effectively processes massive numbers of photos, producing correct maps and digicam positions in real-time. Future work will concentrate on bettering reliability in extraordinarily complicated scenes and deploying the system on robots working in difficult, real-world environments.

{kind=link}