

The dexterity hole: from human hand to robotic hand
Observe your individual hand. As you learn this, it’s holding your telephone or clicking your mouse with seemingly easy grace. With over 20 levels of freedom, human arms possess extraordinary dexterity, which might grip a heavy hammer, rotate a screwdriver, or immediately regulate when one thing slips.
With an identical construction to human arms, dexterous robotic arms supply nice potential:
Common adaptability: Dealing with varied objects from delicate needles to basketballs, adapting to every distinctive problem in actual time.
Tremendous manipulation: Executing advanced duties like key rotation, scissor use, and surgical procedures which are unattainable with easy grippers.
Talent switch: Their similarity to human arms makes them excellent for studying from huge human demonstration knowledge.
Regardless of this potential, most present robots nonetheless depend on easy “grippers” as a result of difficulties of dexterous manipulation. The pliers-like grippers are succesful solely of repetitive duties in structured environments. This “dexterity hole” severely limits robots’ function in our every day lives.
Amongst all manipulation expertise, greedy stands as probably the most elementary. It’s the gateway by means of which many different capabilities emerge. With out dependable greedy, robots can’t choose up instruments, manipulate objects, or carry out advanced duties. Subsequently, we deal with equipping dexterous robots with the potential to robustly grasp numerous objects on this work.
The problem: why dexterous greedy stays elusive
Whereas people can grasp virtually any object with minimal aware effort, the trail to dexterous robotic greedy is fraught with elementary challenges which have stymied researchers for many years:
Excessive-dimensional management complexity. With 20+ levels of freedom, dexterous arms current an astronomically giant management house. Every finger’s motion impacts the complete grasp, making it extraordinarily troublesome to find out optimum finger trajectories and power distributions in real-time. Which finger ought to transfer? How a lot power ought to be utilized? Learn how to regulate in real-time? These seemingly easy questions reveal the extraordinary complexity of dexterous greedy.
Generalization throughout numerous object shapes. Completely different objects demand basically totally different grasp methods. For instance, spherical objects require enveloping grasps, whereas elongated objects want precision grips. The system should generalize throughout this huge range of shapes, sizes, and supplies with out specific programming for every class.
Form uncertainty underneath monocular imaginative and prescient. For sensible deployment in every day life, robots should depend on single-camera programs—probably the most accessible and cost-effective sensing resolution. Moreover, we can’t assume prior data of object meshes, CAD fashions, or detailed 3D data. This creates elementary uncertainty: depth ambiguity, partial occlusions, and perspective distortions make it difficult to precisely understand object geometry and plan applicable grasps.
Our strategy: RobustDexGrasp
To deal with these elementary challenges, we current RobustDexGrasp, a novel framework that tackles every problem with focused options:
Trainer-student curriculum for high-dimensional management. We skilled our system by means of a two-stage reinforcement studying course of: first, a “instructor” coverage learns excellent greedy methods with privileged data (full object form and tactile sensors) by means of intensive exploration in simulation. Then, a “pupil” coverage learns from the instructor utilizing solely real-world notion (single-view level cloud, noisy joint positions) and adapts to real-world disturbances.
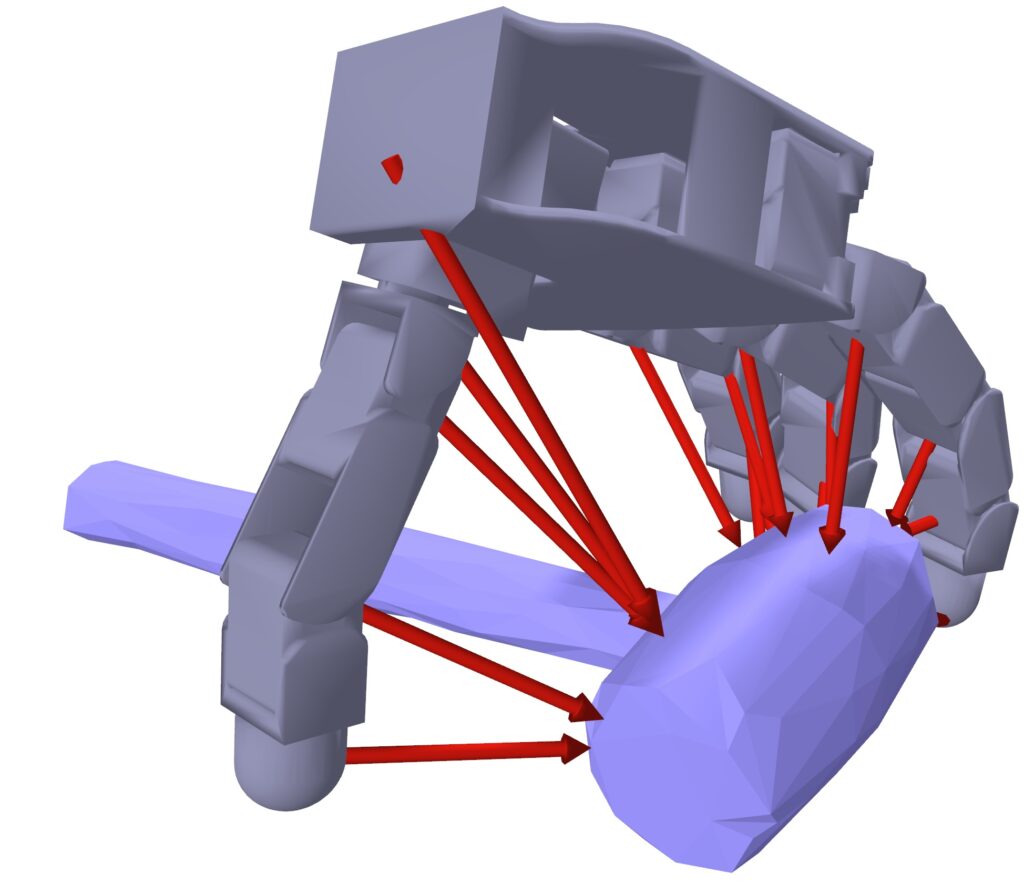
Hand-centric “instinct” for form generalization. As an alternative of capturing full 3D form options, our technique creates a easy “psychological map” that solely solutions one query: “The place are the surfaces relative to my fingers proper now?” This intuitive strategy ignores irrelevant particulars (like colour or ornamental patterns) and focuses solely on what issues for the grasp. It’s the distinction between memorizing each element of a chair versus simply figuring out the place to place your arms to raise it—one is environment friendly and adaptable, the opposite is unnecessarily difficult.
Multi-modal notion for uncertainty discount. As an alternative of counting on imaginative and prescient alone, we mix the digicam’s view with the hand’s “physique consciousness” (proprioception—figuring out the place its joints are) and reconstructed “contact sensation” to cross-check and confirm what it’s seeing. It’s like the way you would possibly squint at one thing unclear, then attain out to the touch it to make sure. This multi-sense strategy permits the robotic to deal with tough objects that may confuse vision-only programs—greedy a clear glass turns into potential as a result of the hand “is aware of” it’s there, even when the digicam struggles to see it clearly.
The outcomes: from laboratory to actuality

Educated on simply 35 simulated objects, our system demonstrates glorious real-world capabilities:
Generalization: It achieved a 94.6% success price throughout a various check set of 512 real-world objects, together with difficult objects like skinny containers, heavy instruments, clear bottles, and mushy toys.
Robustness: The robotic might keep a safe grip even when a major exterior power (equal to a 250g weight) was utilized to the grasped object, exhibiting far larger resilience than earlier state-of-the-art strategies.
Adaptation: When objects have been by chance bumped or slipped from its grasp, the coverage dynamically adjusted finger positions and forces in real-time to recuperate, showcasing a stage of closed-loop management beforehand troublesome to realize.
Past choosing issues up: enabling a brand new period of robotic manipulation
RobustDexGrasp represents an important step towards closing the dexterity hole between people and robots. By enabling robots to understand almost any object with human-like reliability, we’re unlocking new potentialities for robotic purposes past greedy itself. We demonstrated how it may be seamlessly built-in with different AI modules to carry out advanced, long-horizon manipulation duties:
Greedy in muddle: Utilizing an object segmentation mannequin to establish the goal object, our technique permits the hand to select a particular merchandise from a crowded pile regardless of interference from different objects.
Job-oriented greedy: With a imaginative and prescient language mannequin because the high-level planner and our technique offering the low-level greedy talent, the robotic hand can execute grasps for particular duties, equivalent to cleansing up the desk or enjoying chess with a human.
Dynamic interplay: Utilizing an object monitoring module, our technique can efficiently management the robotic hand to understand objects transferring on a conveyor belt.
Wanting forward, we intention to beat present limitations, equivalent to dealing with very small objects (which requires a smaller, extra anthropomorphic hand) and performing non-prehensile interactions like pushing. The journey to true robotic dexterity is ongoing, and we’re excited to be a part of it.
Learn the work in full

Hui Zhang
is a PhD candidate at ETH Zurich.

{kind=link}