
For a while now, we have been listening to about “bistable” units that may stay in both of two states with out expending any power. A brand new one, impressed by plant seed pods, takes the type of a robotic gripper which is powerful but simply activated.
Placing it merely, bistable units are tensioned devices which might be able to switching between two steady states, but they require no energy to stay in both of these states.
Metallic hair clips are an excellent on a regular basis instance, though we have additionally seen the expertise utilized in issues like mini mechanical manta rays, flat-packable structural tubes, and non-powered robotic grippers that grasp objects upon contact.
In the case of the latter, you do not wish to have to use a substantial amount of stress in an effort to set off the greedy motion – this implies you need the gripper to have a low “power barrier.”
The issue is, bistable units with low power obstacles usually haven’t got a lot energy for holding onto the objects they grasp. In different phrases, they’re prone to lose their grip on heavy objects, or on gadgets which might be pulled upon by outdoors forces.
What’s wanted is a gripper that has a low power barrier when initially greedy an object, however that will increase its power barrier as soon as it is holding the merchandise. When it is time to launch the article, the power barrier is lowered once more.
With this requirement in thoughts, a group of Chinese language scientists regarded to the bistable seed-shooting pods of the impatiens plant.
So long as the seeds within the pods are nonetheless immature and never prepared for dispersal, the pods preserve a excessive power barrier, making them tough to set off. As soon as the seeds have matured, nonetheless, that power barrier lessens. Because of this, even the stress of a raindrop is sufficient to trigger the pods to shoot the seeds out onto the encircling soil.
Dr. Jinzhao Yang from Solar Yat-Sen College, Dr. Jianing Wu from Solar Yat-Sen College, and Dr. Haijun Peng from Dalian College of Know-how, China
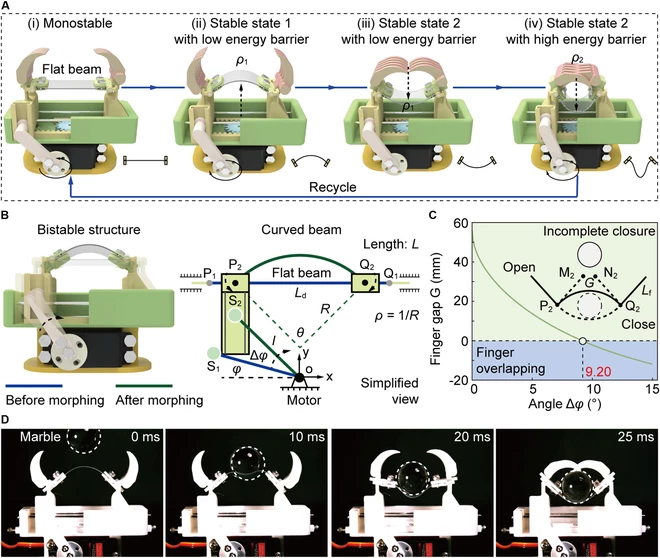
The impatiens-pod-inspired gripper incorporates two greedy “fingers,” the bottoms of that are linked to both finish of an elastic beam. The 2 clamps that join the fingers to the beam are in flip every linked to a rotating motor-driven shaft.
Within the gripper’s impartial default state, the beam is flat and non-tensioned. When it is time to grasp an object, nonetheless, the shafts get rotated, inflicting the beam to bend barely upward. This places it in a tensioned, bistable state with a low power barrier.
Due to this fact, when the gripper is positioned round an object – and that object presses towards the upward-curved beam – it causes the beam to pop right into a downward-curved orientation, drawing the fingers in across the object because it does so.
As soon as this has occurred, the shafts are rotated in the other way, inflicting the beam to bend down even additional. This will increase its power barrier, strengthening and securing the gripper’s grasp on the merchandise.
In an illustration of the expertise, one of many grippers was put in on the highest of a quadcopter drone, permitting the plane to hold from tree branches, railings, and so on as an alternative of getting to hover in place. Though the beam motor used some energy when adjusting the beam pressure, no energy was required to take care of a maintain on the gadgets. Such wouldn’t be the case with a standard gripper.

Haijun Peng
“With its fast response, programmable interplay forces, and easy but environment friendly design, our robotic gripper opens new avenues for next-generation robotic methods,” says Solar Yat-Sen College’s Dr. Jianing Wu, who led the mission together with Dalian College of Know-how’s Dr. Haijun Peng. “This distinctive mechanism can considerably develop the performance of robots for various functions.”
A paper on the research was just lately printed within the journal Analysis.
Supply: Analysis by way of EurekAlert

{kind=link}