
Catastrophe websites range as broadly as rescue missions. Utilizing robotics to assist usually requires a number of robots to survey, climb, raise, or manipulate objects. Athena unites all these capabilities in a single, rugged, autonomous platform constructed for search and rescue.
The primary documented use of robots in catastrophe response dates again to 1986, when machines have been deployed at Chernobyl to assist with radiation reconnaissance and cleanup. Within the many years since, robots have proven up at numerous different eventualities the place sending a human being first was just too harmful. They’ve additionally been deployed alongside rescue employees, gathering information, conducting surveillance, and, in some circumstances, helping.
The issue is, no two catastrophe websites are ever the identical. Subsequently, no search-and-rescue missions are an identical. Some might require climbing stairs and gathering real-time information, whereas others might require crawling by way of rubble and opening latches. Consequently, robots designed for very particular duties might instantly turn out to be ineffective when different duties are required.

Clay Gilliland/C.C. 2.0
Flying robots are quick and wonderful for surveying massive areas, however they wrestle to hold heavy instruments or work together with the surroundings. Legged robots can traverse advanced terrain, however they’re usually restricted in payload and stability. Tracked robots, then again, are sturdy and steady, however are likely to sacrifice agility. You would deploy a number of robots, however that raises a distinct set of issues.
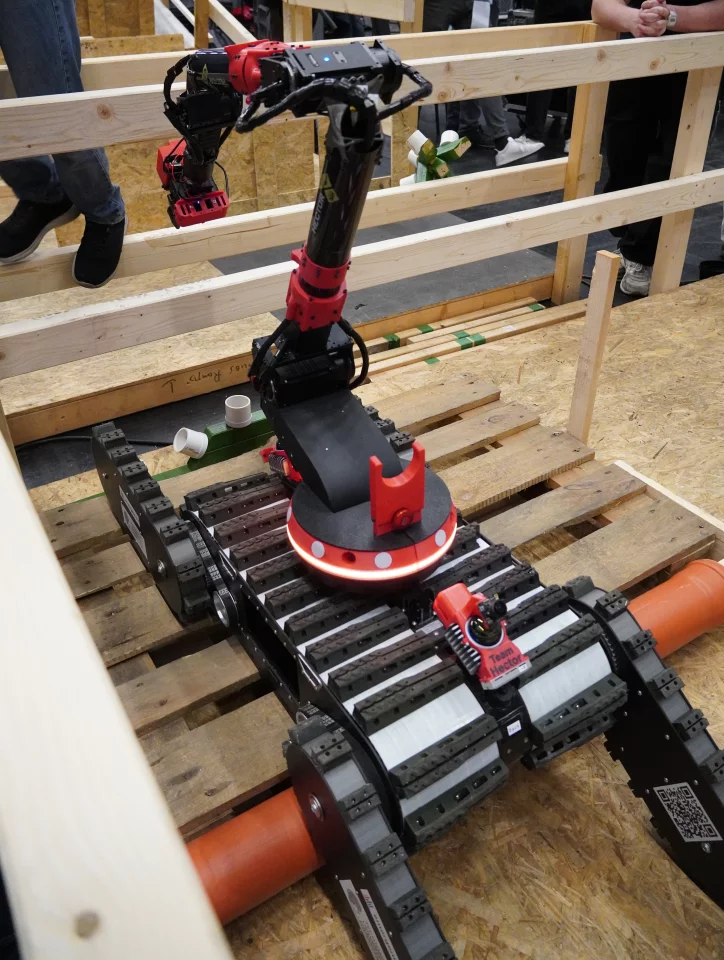
To deal with these challenges, researchers from the SIM Group at Germany’s Technical College of Darmstadt created Athena, an autonomous, rugged, and modular search-and-rescue robotic constructed on open {hardware}. Somewhat than overspecializing, the robotic combines a number of capabilities right into a single adaptable platform.

Stefan Fabian
It primarily makes use of tracks to navigate varied forms of terrain. Nevertheless, in contrast to standard tracked robots, which have a comparatively inflexible footprint, Athena’s tracks are connected to 4 independently managed flipper arms. On flat surfaces, the arms stay tucked in, and the robotic strikes like a standard tracked robotic. Nevertheless, every arm can rotate and reposition itself, permitting the robotic to reconfigure its total form in response to the terrain.
For instance, when Athena hits a step or an impediment, the entrance flippers lengthen ahead and upward, hooking onto the ledge earlier than pulling up the remainder of the robotic and stabilizing it.
“4 individually reconfigurable flippers considerably enhance terrain adaptability in comparison with the earlier design, the place back and front have been every linked,” explains Stefan Fabian, a member of the analysis staff beneath the emergenCITY analysis venture.
When totally prolonged, the robotic grows from 28 to 50 inches (711 to 1,270 mm) in size, a big attain for a 110-lb (50-kg) machine that folds all the way down to a measurement sufficiently small to slot in airline baggage. Throughout testing, Athena was in a position to scale steps as much as 16 inches (406 mm) excessive and climb stairs inclined at as much as 45 levels. For context, a normal stair riser within the US is round 7.5 inches (191 mm).
Stefan Fabian
We’ve established that Athena has navigation on lockdown, however that is just one piece of the puzzle in catastrophe eventualities. One other essential side is manipulation. Robots might must open doorways, flip valves, press buttons, or retrieve objects. Athena achieves this with an extendable arm.
Mounted on the middle of the robotic is a seven-jointed robotic arm with a attain of over 59 inches (150 cm). The seven revolute joints make the arm kinematically redundant, which means there are a number of methods to place the arm to attain the identical end-effector pose. In follow, this provides the system extra flexibility to navigate round obstacles whereas nonetheless reaching a goal.
The arm can raise 16 lb (7.25 kg) when near the bottom and 6.4 lb (2.9 kg) when totally prolonged. It’s designed to open doorways, function valves, press buttons, and acquire samples. When not in use, it folds and locks magnetically onto a devoted armrest to cut back its visible footprint and defend it throughout aggressive driving. On the finish of the arm is a gripper that may apply as much as 170 newtons (38 pound-force) of gripping drive. A force-torque sensor on the wrist permits the arm to detect and reply to bodily resistance.
Past navigation and manipulation, Athen contains a suite of sensors that permits it to see virtually all the things. This suite consists of an RGB-D depth digicam, a thermal digicam, a wide-angle RGB digicam, a high-power LED, and LiDAR.

Stefan Fabian
The mind of the whole system is an onboard PC. Nevertheless, GPU-intensive duties are offloaded to an exterior processor. The 2 computer systems talk over an inside 2.5 Gbit community, with a TP-Hyperlink outside entry level offering wi-fi connectivity to a distant operator. The entire stack runs on a pair of LiPo battery bins. The robotic can even run immediately from an exterior 24 V energy provide when prolonged deployment is required, and a cable connection is possible.
One of many much less glamorous however essential points of Athena’s design is its emergency cease system. When a 110-lb machine with a robust arm begins behaving unexpectedly, you want to have the ability to minimize energy instantly and with out query. The Athena staff custom-built their very own emergency cease system that may minimize energy to the robotic virtually immediately, both by way of bodily controls or a wi-fi distant. If communication is misplaced, the system routinely shuts down as a fail-safe.
Now, the Athena robotic is neither the primary nor the one of its type. Nevertheless, what makes it particular is the distinctive mixture of spectacular options. It isn’t every single day you see a battery-powered, autonomous robotic that may climb over particles, stabilize itself utilizing its flippers, lengthen its highly effective arm right into a confined area, and punctiliously flip a valve whereas concurrently scanning the surroundings with a number of superior sensors. Not forgetting that the entire thing can match right into a suitcase. Apparently, this attribute was a non-negotiable for the staff.
“The chassis has to suit into normal baggage. We have now to journey to worldwide competitions to check the robustness of our options, and robotic transport is sort of costly. By with the ability to disassemble the robotic and transporting it as checked baggage, we save fairly a bit of time and money,” says Fabian
Regardless of all these qualities, maybe essentially the most distinctive factor about Athena, past any single technical specification, is the staff’s philosophy. Most superior robotic platforms are closed techniques. They’re costly, proprietary, and tough to change. For researchers, this creates a bottleneck, considerably slowing down progress. The Athena staff took the alternative strategy, making the whole system open.
“Constructing a light-weight but highly effective robotic with clever energy administration and powerful compute from scratch is an especially advanced activity, and we hope that by open-sourcing our full design and sharing our classes realized, different teams that want a {custom} platform for his or her analysis haven’t got to begin from sq. one,” states Fabian.
The total CAD recordsdata, PCB designs, and low-level software program are all publicly out there on GitHub. With that degree of accessibility, we’re sure to see upgraded, modded-out variations of Athena. All the higher for search-and-rescue robotics!
A paper detailing the Athena platform was introduced on the IEEE Worldwide Symposium on Security, Safety, and Rescue Robotics (SSRR) 2025 and printed in IEEE Xplore.

{kind=link}