
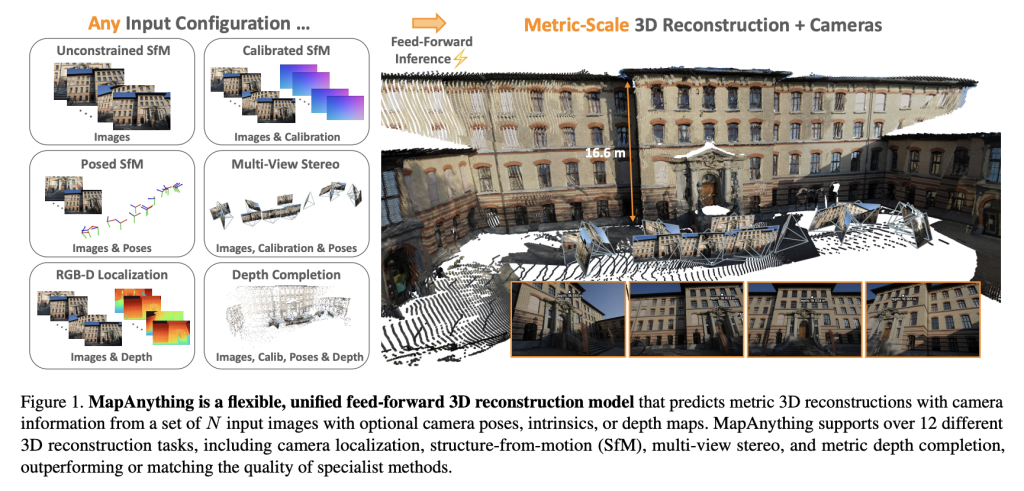
A crew of researchers from Meta Actuality Labs and Carnegie Mellon College has launched MapAnything, an end-to-end transformer structure that immediately regresses factored metric 3D scene geometry from pictures and elective sensor inputs. Launched beneath Apache 2.0 with full coaching and benchmarking code, MapAnything advances past specialist pipelines by supporting over 12 distinct 3D imaginative and prescient duties in a single feed-forward move.
Why a Common Mannequin for 3D Reconstruction?
Picture-based 3D reconstruction has traditionally relied on fragmented pipelines: function detection, two-view pose estimation, bundle adjustment, multi-view stereo, or monocular depth inference. Whereas efficient, these modular options require task-specific tuning, optimization, and heavy post-processing.
Latest transformer-based feed-forward fashions reminiscent of DUSt3R, MASt3R, and VGGT simplified elements of this pipeline however remained restricted: mounted numbers of views, inflexible digicam assumptions, or reliance on coupled representations that wanted costly optimization.
MapAnything overcomes these constraints by:
- Accepting as much as 2,000 enter pictures in a single inference run.
- Flexibly utilizing auxiliary knowledge reminiscent of digicam intrinsics, poses, and depth maps.
- Producing direct metric 3D reconstructions with out bundle adjustment.
The mannequin’s factored scene illustration—composed of ray maps, depth, poses, and a world scale issue—supplies modularity and generality unmatched by prior approaches.
Structure and Illustration
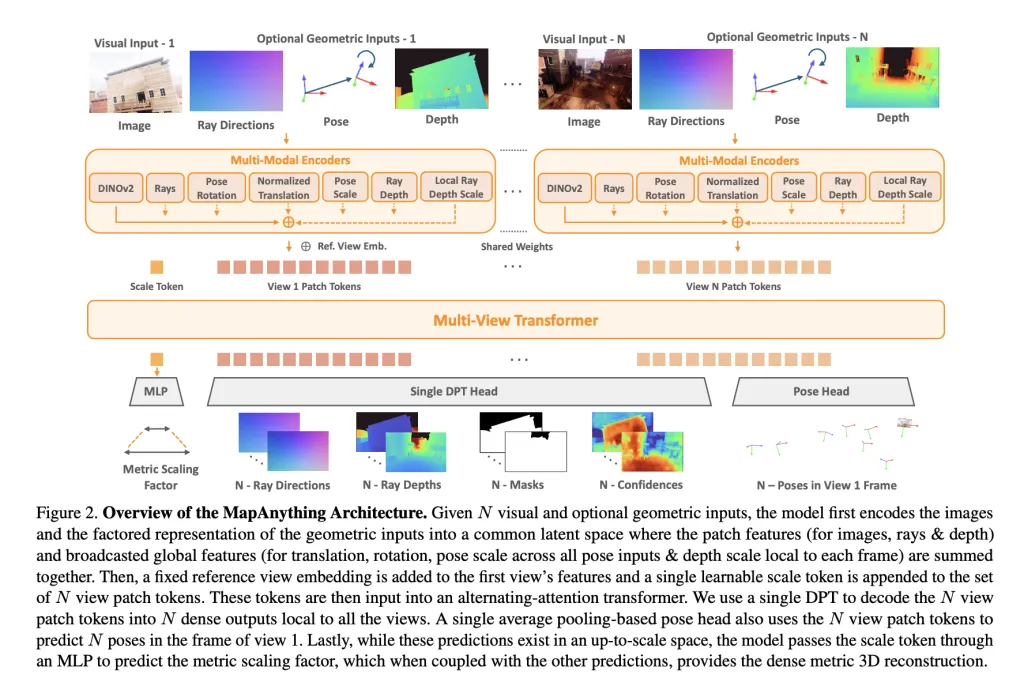
At its core, MapAnything employs a multi-view alternating-attention transformer. Every enter picture is encoded with DINOv2 ViT-L options, whereas elective inputs (rays, depth, poses) are encoded into the identical latent house through shallow CNNs or MLPs. A learnable scale token allows metric normalization throughout views.
The community outputs a factored illustration:
- Per-view ray instructions (digicam calibration).
- Depth alongside rays, predicted up-to-scale.
- Digicam poses relative to a reference view.
- A single metric scale issue changing native reconstructions right into a globally constant body.
This specific factorization avoids redundancy, permitting the identical mannequin to deal with monocular depth estimation, multi-view stereo, structure-from-motion (SfM), or depth completion with out specialised heads.
Coaching Technique
MapAnything was educated throughout 13 numerous datasets spanning indoor, outside, and artificial domains, together with BlendedMVS, Mapillary Planet-Scale Depth, ScanNet++, and TartanAirV2. Two variants are launched:
- Apache 2.0 licensed mannequin educated on six datasets.
- CC BY-NC mannequin educated on all 13 datasets for stronger efficiency.
Key coaching methods embrace:
- Probabilistic enter dropout: Throughout coaching, geometric inputs (rays, depth, pose) are supplied with various possibilities, enabling robustness throughout heterogeneous configurations.
- Covisibility-based sampling: Ensures enter views have significant overlap, supporting reconstruction as much as 100+ views.
- Factored losses in log-space: Depth, scale, and pose are optimized utilizing scale-invariant and sturdy regression losses to enhance stability.
Coaching was carried out on 64 H200 GPUs with combined precision, gradient checkpointing, and curriculum scheduling, scaling from 4 to 24 enter views.
Benchmarking Outcomes
Multi-View Dense Reconstruction
On ETH3D, ScanNet++ v2, and TartanAirV2-WB, MapAnything achieves state-of-the-art (SoTA) efficiency throughout pointmaps, depth, pose, and ray estimation. It surpasses baselines like VGGT and Pow3R even when restricted to photographs solely, and improves additional with calibration or pose priors.
For instance:
- Pointmap relative error (rel) improves to 0.16 with solely pictures, in comparison with 0.20 for VGGT.
- With pictures + intrinsics + poses + depth, the error drops to 0.01, whereas reaching >90% inlier ratios.
Two-View Reconstruction
In opposition to DUSt3R, MASt3R, and Pow3R, MapAnything constantly outperforms throughout scale, depth, and pose accuracy. Notably, with extra priors, it achieves >92% inlier ratios on two-view duties, considerably past prior feed-forward fashions.
Single-View Calibration
Regardless of not being educated particularly for single-image calibration, MapAnything achieves an common angular error of 1.18°, outperforming AnyCalib (2.01°) and MoGe-2 (1.95°).
Depth Estimation
On the Strong-MVD benchmark:
- MapAnything units new SoTA for multi-view metric depth estimation.
- With auxiliary inputs, its error charges rival or surpass specialised depth fashions reminiscent of MVSA and Metric3D v2.
Total, benchmarks affirm 2× enchancment over prior SoTA strategies in lots of duties, validating the advantages of unified coaching.
Key Contributions
The analysis crew spotlight 4 main contributions:
- Unified Feed-Ahead Mannequin able to dealing with greater than 12 drawback settings, from monocular depth to SfM and stereo.
- Factored Scene Illustration enabling specific separation of rays, depth, pose, and metric scale.
- State-of-the-Artwork Efficiency throughout numerous benchmarks with fewer redundancies and better scalability.
- Open-Supply Launch together with knowledge processing, coaching scripts, benchmarks, and pretrained weights beneath Apache 2.0.
Conclusion
MapAnything establishes a brand new benchmark in 3D imaginative and prescient by unifying a number of reconstruction duties—SfM, stereo, depth estimation, and calibration—beneath a single transformer mannequin with a factored scene illustration. It not solely outperforms specialist strategies throughout benchmarks but additionally adapts seamlessly to heterogeneous inputs, together with intrinsics, poses, and depth. With open-source code, pretrained fashions, and assist for over 12 duties, MapAnything lays the groundwork for a very general-purpose 3D reconstruction spine.
Try the Paper, Codes and Undertaking Web page. Be at liberty to take a look at our GitHub Web page for Tutorials, Codes and Notebooks. Additionally, be at liberty to observe us on Twitter and don’t overlook to hitch our 100k+ ML SubReddit and Subscribe to our Publication.

Michal Sutter is a knowledge science skilled with a Grasp of Science in Information Science from the College of Padova. With a strong basis in statistical evaluation, machine studying, and knowledge engineering, Michal excels at remodeling advanced datasets into actionable insights.

{kind=link}