
A brand new deep studying mannequin from Cardiff College helps robots select safer, extra dependable paths—marking a shift from acrobatics to real-world navigation.

Robots might quickly prioritize navigation accuracy over flashy stunts, due to a brand new deep studying mannequin developed by researchers at Cardiff College. The system, referred to as localization-aware navigation, teaches robots to decide on paths that maintain them oriented in area—even when these routes are longer—considerably enhancing efficiency in real-world situations.
In simulation exams utilizing the iGibson setting, the strategy achieved a 49% success price in tough situations, in contrast with 33% for traditional SLAM-based navigation. Robots additionally maintained decrease localization error and tailored higher to unfamiliar environments, demonstrating stronger real-world potential.

The development addresses a long-standing problem in robotics: dependable navigation exterior of tightly managed labs. Conventional approaches usually separate two processes—path planning and localization—creating threat when a robotic’s estimate of its place drifts. By integrating the 2 right into a single decision-making loop, Cardiff’s mannequin ensures motion selections are continually knowledgeable by localization high quality.
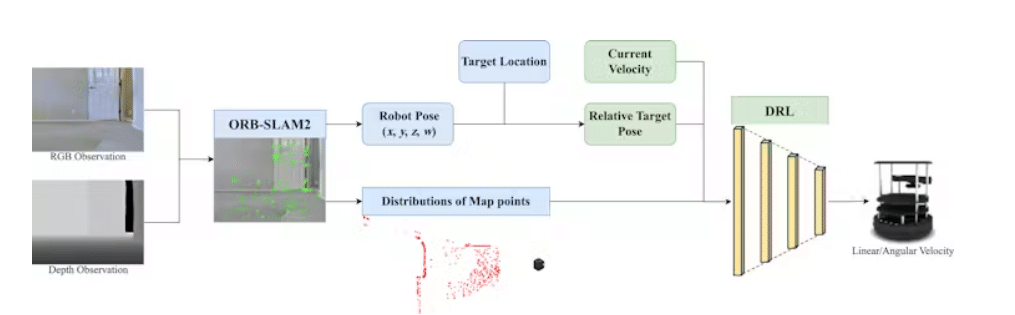
The system leverages RGB-D digicam enter and ORB-SLAM2, a preferred visible simultaneous localization and mapping algorithm. As an alternative of assuming ORB-SLAM2 at all times succeeds, the mannequin evaluates the spatial distribution of map factors, grouping them into angular sectors to measure how visually “protected” completely different instructions are. Robots are rewarded for selecting routes wealthy in visible cues fairly than featureless hallways that may confuse mapping programs.
A key innovation is its dynamic suggestions mechanism. Not like conventional fashions that depend on inflexible penalty thresholds, Cardiff’s framework adapts thresholds utilizing relative pose error, offering real-time evaluation of whether or not a motion improves or worsens localization. This adaptability helps robots make higher selections in altering or unpredictable settings.
Whereas many robotics demonstrations highlight acrobatics like flips or cartwheels, such feats not often translate into sensible use instances. Navigation, nevertheless, is key for real-world deployment—from supply robots navigating crowded campuses to autonomous machines working in warehouses or hospitals. The staff’s subsequent step is transferring from simulation to real-world trials, the place robots will navigate dynamic environments corresponding to pedestrian-heavy areas. If profitable, localization-aware navigation may grow to be a cornerstone in robotics, shifting the main target from spectacle to reliability.

{kind=link}