

The system lets human-shaped robots transfer like folks in actual time, serving to them do duties in locations which might be laborious to succeed in or unsafe.
Controlling robots remotely in actual time, referred to as teleoperation, might be helpful in lots of real-world conditions. Some engineers have lately been engaged on methods that permit customers information humanoid robots, which have a human-like physique, to repeat full-body actions precisely.
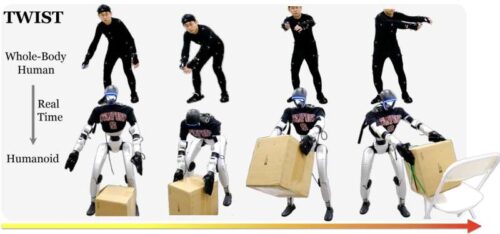
Researchers at Stanford College and Simon Fraser College have developed a brand new system known as TWIST (teleoperated whole-body imitation system). It permits humanoid robots to carefully comply with a human’s full-body actions in actual time and full varied real-world duties.

The aim is to offer humanoid robots the identical stage of full-body management as people. In on a regular basis conditions, akin to working in a messy kitchen, folks naturally use each palms, toes, and even different components of their our bodies—like elbows or sides—to work together with their atmosphere. The goal is for humanoid robots to carry out in the same manner by immediately imitating human actions.
The staff examined their teleoperation system by way of a sequence of real-world experiments utilizing the G1 humanoid robotic developed by Unitree Robotics. The outcomes confirmed that the system efficiently enabled distant management of the robotic and is also tailored to be used with different humanoid robots, such because the T1 mannequin by Booster Robotics.
The important thing discovering was that full-body human movement knowledge is efficient for controlling humanoid robots, together with their legs, toes, waist, knees, and elbows. The system permits these physique components to maneuver in a manner that carefully matches human movement, giving robots human-like, full-body coordination. One sensible use of this functionality is to have people management humanoid robots to gather large-scale movement knowledge for coaching robotic basis fashions.
Sooner or later, the TWIST system may very well be improved by lowering its dependence on movement seize methods, which aren’t moveable and restrict its use. With additional growth, the system may very well be deployed in real-world environments, akin to enabling robots to carry out handbook duties in hazardous areas or to automate industrial processes that demand excessive precision.
The subsequent step in growth entails increasing knowledge assortment and enabling robots to be taught and carry out duties autonomously, aiming to make humanoid robots extra succesful and efficient in real-world functions.

{kind=link}