
 The researchers demonstrated that the vine robotic can safely and stably elevate quite a lot of heavy and fragile objects, like a watermelon. Picture credit score: Courtesy of the researchers
The researchers demonstrated that the vine robotic can safely and stably elevate quite a lot of heavy and fragile objects, like a watermelon. Picture credit score: Courtesy of the researchers
By Jennifer Chu
Within the horticultural world, some vines are particularly grabby. As they develop, the woody tendrils can wrap round obstacles with sufficient power to tug down complete fences and timber.
Impressed by vines’ twisty tenacity, engineers at MIT and Stanford College have developed a robotic gripper that may snake round and elevate quite a lot of objects, together with a glass vase and a watermelon, providing a gentler strategy in comparison with typical gripper designs. A bigger model of the robo-tendrils may also safely elevate a human away from bed.
The brand new bot consists of a pressurized field, positioned close to the goal object, from which lengthy, vine-like tubes inflate and develop, like socks being turned inside out. As they lengthen, the vines twist and coil across the object earlier than persevering with again towards the field, the place they’re routinely clamped in place and mechanically wound again as much as gently elevate the article in a mushy, sling-like grasp.
The researchers demonstrated that the vine robotic can safely and stably elevate quite a lot of heavy and fragile objects. The robotic may also squeeze by tight quarters and push by litter to succeed in and grasp a desired object.
The crew envisions that this sort of robotic gripper might be utilized in a variety of situations, from agricultural harvesting to loading and unloading heavy cargo. Within the close to time period, the group is exploring functions in eldercare settings, the place mushy inflatable robotic vines might assist to softly elevate an individual away from bed.
“Transferring an individual away from bed is among the most bodily strenuous duties {that a} caregiver carries out,” says Kentaro Barhydt, a PhD candidate in MIT’s Division of Mechanical Engineering. “This sort of robotic can assist relieve the caretaker, and might be gentler and extra snug for the affected person.”
Barhydt, alongside together with his co-first writer from Stanford, O. Godson Osele, and their colleagues, current the brand new robotic design within the journal Science Advances. The research’s co-authors are Harry Asada, the Ford Professor of Engineering at MIT, and Allison Okamura, the Richard W. Weiland Professor of Engineering at Stanford College, together with Sreela Kodali and Cosmia du Pasquier at Stanford College, and former MIT graduate pupil Chase Hartquist, now on the College of Florida, Gainesville.
Open and closed
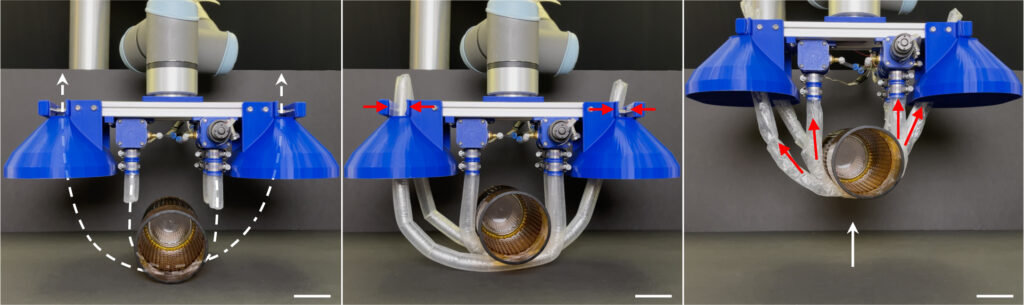 As they lengthen, the vines twist and coil across the object earlier than persevering with again towards the field, the place they’re routinely clamped in place and mechanically wound again as much as gently elevate the article in a mushy, sling-like grasp. Picture credit score: Courtesy of the researchers.
As they lengthen, the vines twist and coil across the object earlier than persevering with again towards the field, the place they’re routinely clamped in place and mechanically wound again as much as gently elevate the article in a mushy, sling-like grasp. Picture credit score: Courtesy of the researchers.
The crew’s Stanford collaborators, led by Okamura, pioneered the event of soppy, vine-inspired robots that develop outward from their ideas. These designs are largely constructed from skinny but sturdy pneumatic tubes that develop and inflate with managed air strain. As they develop, the tubes can twist, bend, and snake their manner by the atmosphere, and squeeze by tight and cluttered areas.
Researchers have largely explored vine robots to be used in security inspections and search and rescue operations. However at MIT, Barhydt and Asada, whose group has developed robotic aides for the aged, questioned whether or not such vine-inspired robots might tackle sure challenges in eldercare — particularly, the problem of safely lifting an individual away from bed. Usually in nursing and rehabilitation settings, this switch course of is finished with a affected person elevate, operated by a caretaker who should first bodily transfer a affected person onto their aspect, then again onto a hammock-like sheet. The caretaker straps the sheet across the affected person and hooks it onto the mechanical elevate, which then can gently hoist the affected person away from bed, much like suspending a hammock or sling.
The MIT and Stanford crew imagined that as a substitute, a vine-like robotic might gently snake underneath and round a affected person to create its personal form of sling, and not using a caretaker having to bodily maneuver the affected person. However with a view to elevate the sling, the researchers realized they must add a component that was lacking in current vine robotic designs: Primarily, they must shut the loop.
Most vine-inspired robots are designed as “open-loop” methods, which means they act as open-ended strings that may lengthen and bend in numerous configurations, however they aren’t designed to safe themselves to something to kind a closed loop. If a vine robotic might be made to remodel from an open loop to a closed loop, Barhydt surmised that it might make itself right into a sling across the object and pull itself up, together with no matter, or whomever, it’d maintain.
For his or her new research, Barhydt, Osele, and their colleagues define the design for a brand new vine-inspired robotic gripper that mixes each open- and closed-loop actions. In an open-loop configuration, a robotic vine can develop and twist round an object to create a agency grasp. It could even burrow underneath a human mendacity on a mattress. As soon as a grasp is made, the vine can proceed to develop again towards and connect to its supply, making a closed loop that may then be retracted to retrieve the article.
“Individuals may assume that with a view to seize one thing, you simply attain out and seize it,” Barhydt says. “However there are totally different levels, comparable to positioning and holding. By remodeling between open and closed loops, we are able to obtain new ranges of efficiency by leveraging some great benefits of each types for his or her respective levels.”
Light suspension
As an indication of their new open- and closed-loop idea, the crew constructed a large-scale robotic system designed to soundly elevate an individual up from a mattress. The system includes a set of pressurized containers connected on both finish of an overhead bar. An air pump contained in the containers slowly inflates and unfurls skinny vine-like tubes that reach down towards the top and foot of a mattress. The air strain might be managed to softly work the tubes underneath and round an individual, earlier than stretching again as much as their respective containers. The vines then thread by a clamping mechanism that secures the vines to every field. A winch winds the vines again up towards the containers, gently lifting the individual up within the course of.
“Heavy however fragile objects, comparable to a human physique, are troublesome to know with the robotic arms which are out there at this time,” Asada says. “We’ve developed a vine-like, rising robotic gripper that may wrap round an object and droop it gently and securely.”
“There’s a whole design house we hope this work conjures up our colleagues to proceed to discover,” says co-lead writer Osele. “I particularly stay up for the implications for affected person switch functions in well being care.”
“I’m very enthusiastic about future work to make use of robots like these for bodily helping folks with mobility challenges,” provides co-author Okamura. “Tender robots might be comparatively protected, low-cost, and optimally designed for particular human wants, in distinction to different approaches like humanoid robots.”
Whereas the crew’s design was motivated by challenges in eldercare, the researchers realized the brand new design is also tailored to carry out different greedy duties. Along with their large-scale system, they’ve constructed a smaller model that may connect to a industrial robotic arm. With this model, the crew has proven that the vine robotic can grasp and elevate quite a lot of heavy and fragile objects, together with a watermelon, a glass vase, a kettle bell, a stack of metallic rods, and a playground ball. The vines may also snake by a cluttered bin to tug out a desired object.
“We predict this sort of robotic design might be tailored to many functions,” Barhydt says. “We’re additionally eager about making use of this to heavy business, and issues like automating the operation of cranes at ports and warehouses.”
This work was supported, partly, by the Nationwide Science Basis and the Ford Basis.

MIT Information

{kind=link}